
東京的機器人新創「アールティ(RT)」已開始銷售基於 MEVIUS 的研究教育用機器人,開源硬體式的四足機器人開發已經展開...
犬型(四足步行)機器人的性能提升正在以驚人速度前進,《日經》報導,日本的新創公司也開始開發自主機型展開追趕,雖然美中仍然遙遙領先,但日學者表示:「即便一開始只是追隨海外研究,只要實際製造並操作機器人,就能獲得面向未來的寶貴經驗。我們希望透過開放的開發體制厚實研究人力,最終趕上甚至超越海外勢力。」
在人型機器人熱潮的陰影下,犬型(四足步行)機器人的性能提升與用途開發正以驚人的速度推進。一方面它們已被導入設施巡邏警備或危險作業環境,另一方面也逐漸出現像無人機一樣的軍事用途可能性。在美中企業於機器人開發大幅領先的情況下,日本的新創公司也開始開發自主機型,展開追趕。
東京大學發的新創公司「Highlanders」正在開發的四足步行機器人「HLQ Pro」
四足步行機器人源自麻省理工學院(MIT)的研究,美國的波士頓動力公司(Boston Dynamics)在2000年代起陸續開發了以軍事用途為前提的「BigDog」及後繼機「Spot」。2020年起 Spot 開始對一般市場銷售,被應用於工廠及能源設施的監視、檢查作業。近年來,中國的宇樹科技(Unitree Robotics)等公司迅速崛起,使市場急速擴大。
美國企業甚至展示了裝配步槍、火箭發射器、火焰放射器的四足機器人。中國則公開了士兵與機器人聯合作戰演習的場景。另有消息指出,烏克蘭軍已經在使用英國企業提供的四足機器人,未來很可能會像無人機一樣,被當作「步行版」正式投入戰場。
各家公司開發的機型不僅能如同散步的犬隻般行走,還能靈巧地上下樓梯、以後腳單獨站立,甚至能夠跳躍並在空中完成後空翻。這些高難度動作並非單純透過程式預先設定,而是依靠「強化學習」這一人工智慧(AI)技術逐步習得。
四足機器人利用相當於「眼睛」的攝影機與 LiDAR(三維雷射掃描技術)來掌握周圍狀況。無論是巡邏監視時發現異常,還是透過自我定位實現自律步行,這些功能都仰賴影像處理的 AI 技術。
日本的鴻池組與專門為機器人開發應用程式的口袋查詢公司(Pocket Queries,新宿)合作,利用宇樹科技的四足機器人進行山區隧道工地的爆破後切削面(掘削面)遠端檢測實驗。透過機器人搭載的高性能攝影機,能達到與人工觀察相同精度的判斷。今後計畫導入 AI 來自動評估掘削狀況,並確立 LiDAR 技術的自律行走。
目前在日本,四足機器人的應用仍以外國製機型為主,但國產化的動向已經浮現。東京大學新創「Highlanders」於 2025 年 5 月發表了獨立開發的「HLQ」系列測試版,包括「HLQ Pro」(寬 44 公分、長 88 公分、重 60 公斤)與「HLQ Air」(寬 60 公分、長 28 公分、重 8.5 公斤)兩種。
「Pro」具備防塵防滴功能,適合在危險環境中運送滅火器材或有害物質檢測器,並能透過感測器即時偵測障礙物與地形變化來最佳化步伐;而小型輕量的「Air」則能進入狹小通道或設備縫隙中作業。這兩種型號已經在自治體、工廠業者、汽車製造商等場所進行測試,預計今年內推出正式版。
該公司代表增岡宏哉表示:「從經濟安全保障角度來看,四足步行機器人過度依賴外國製並不可取。雖然與中國等國存在巨大差距,但我們希望透過強化安全性、信賴性與耐久性來實現差異化。」
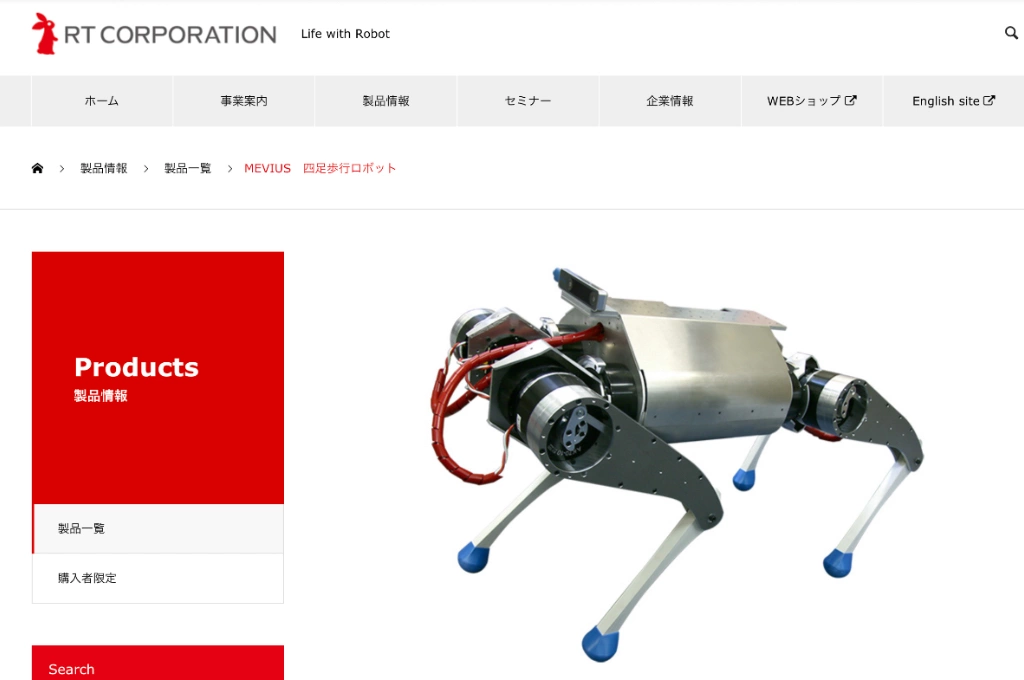
另一方面,為了提升四足機器人技術,東京大學研究科講師河原塚健人等人正推動一個新開發平台。研究者或企業只要需要零件、軟體或 AI 學習環境,都能透過該平台獲得。這套名為「MEVIUS」的標準機器人,可供作為共同開發基礎。
這是一種將軟體領域盛行的「開源」機制擴展到機器人開發的「開源硬體」嘗試。零件可透過 Misumi 集團的加工服務訂製。以往的開源硬體四足機器人大多採用 3D 列印塑膠件,而 MEVIUS 採用高耐久性的金屬零件是其特色。
東京的機器人新創「アールティ(RT)」已開始銷售基於 MEVIUS 的研究教育用機器人,開源硬體式的四足機器人開發已經展開。河原塚本人也以 MEVIUS 為基礎,開發出能後空翻、甚至攀牆而上的衍生型四足機器人「KLEIYN」。
雖然美中仍然遙遙領先,但河原塚表示:「即便一開始只是追隨海外研究,只要實際製造並操作機器人,就能獲得面向未來的寶貴經驗。我們希望透過開放的開發體制厚實研究人力,最終趕上甚至超越海外勢力。」
(圖片來源:アールティ(RT)官網)











